STAT2005 Computer Simulation
Lecture 8 — Time Series Modelling
30 Apr 2026
Example: Simulate an AR(1) process with (\(\phi = 0.7\)):
\[ X_t = 0.7 X_{t-1} + \varepsilon_t, \quad \varepsilon_t \sim \text{i.i.d. } N(0,1) \]
R Version
set.seed(1234)
n <- 1000; phi <- 0.7
epsilon <- rnorm(n, mean = 0, sd = 1)
X <- numeric(n)
X[1] <- 0 # initial value
for (t in 2:n) {
X[t] <- phi * X[t-1] + epsilon[t]
}
par(mar=c(4, 4, 2, 1))
plot(X, type = "l", main = "AR(1) Process (phi = 0.7)",
xlab = "Time", ylab = "Value")
abline(h = 0, col = "red", lty = 2, lwd = 2)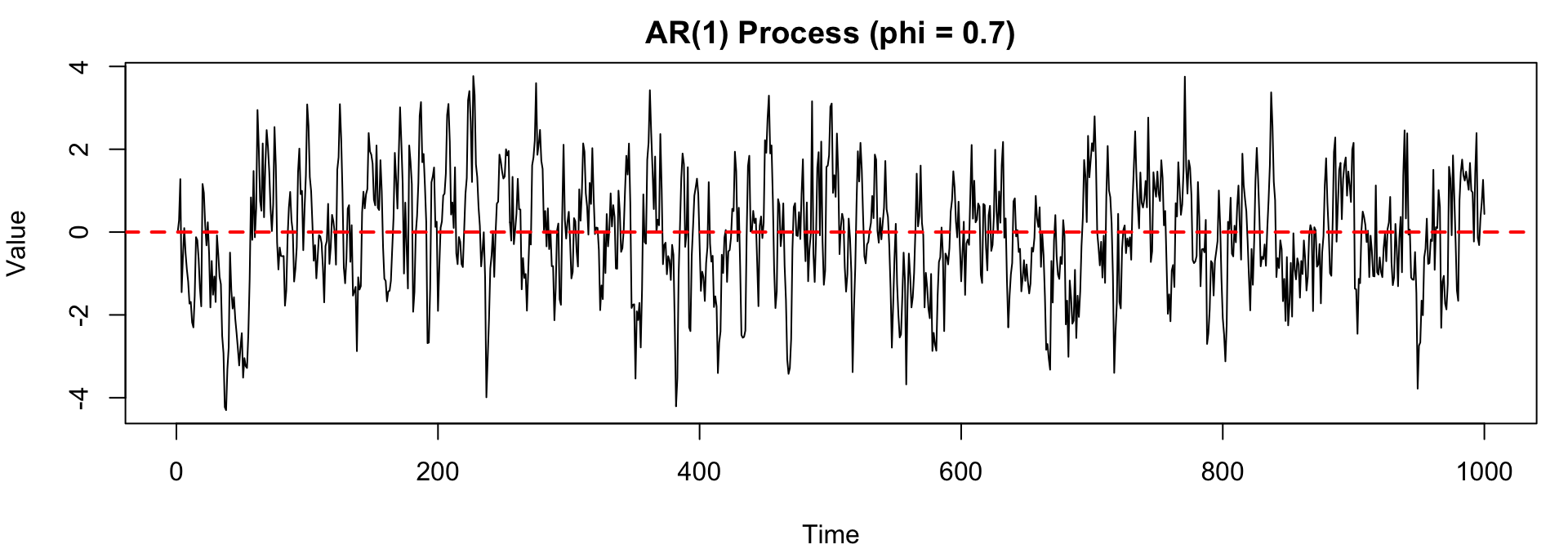
Python Version
import numpy as np
import matplotlib.pyplot as plt
np.random.seed(1234)
n = 1000
phi = 0.7
epsilon = np.random.normal(0, 1, n)
X = np.zeros(n)
for t in range(1, n):
X[t] = phi * X[t-1] + epsilon[t]
plt.plot(X, color='blue')
plt.axhline(0, color='red', linestyle='--', linewidth=2)
plt.title('AR(1) Process (phi = 0.7)')
plt.xlabel('Time')
plt.ylabel('Value')
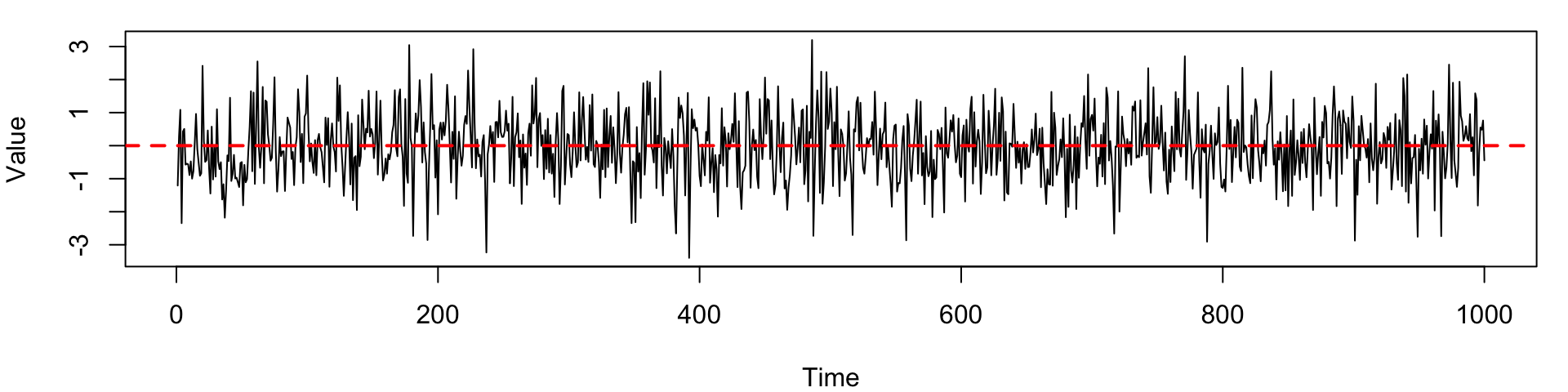
plt.show()- values exhibit persistence, tending to stay above or below zero for periods of time,
- shocks do not disappear immediately, but instead propagate gradually,
- the series appears smoother (than white noise), with visible structure over time.
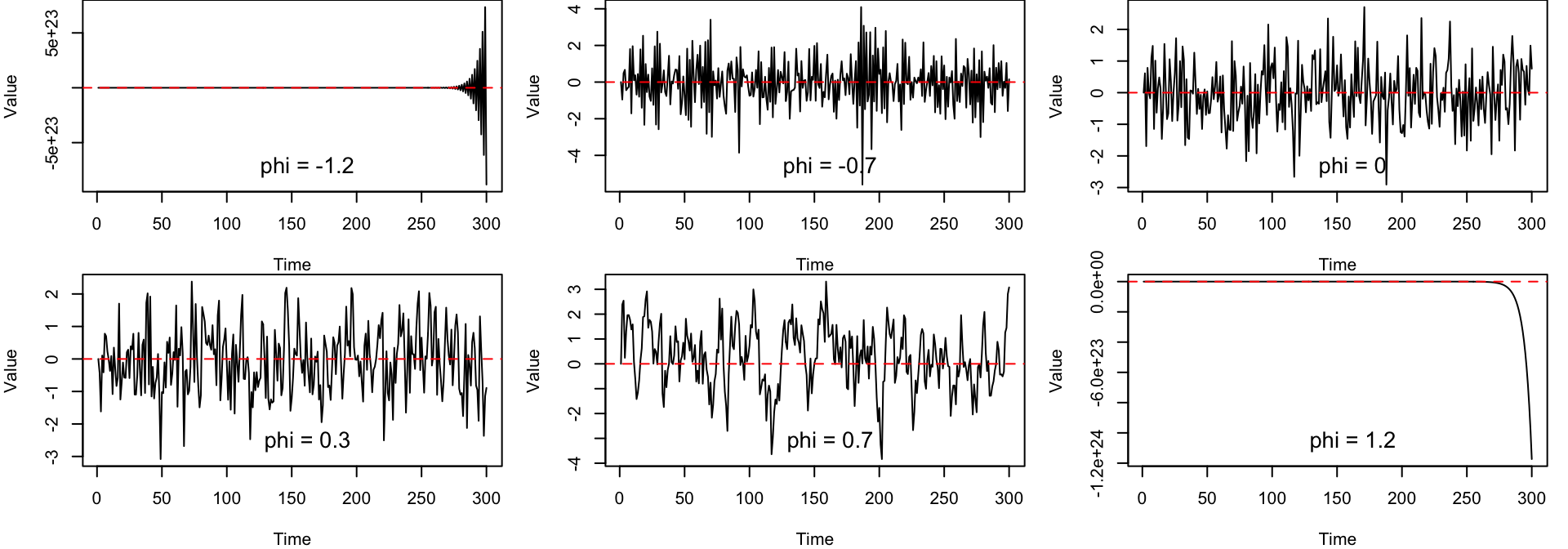
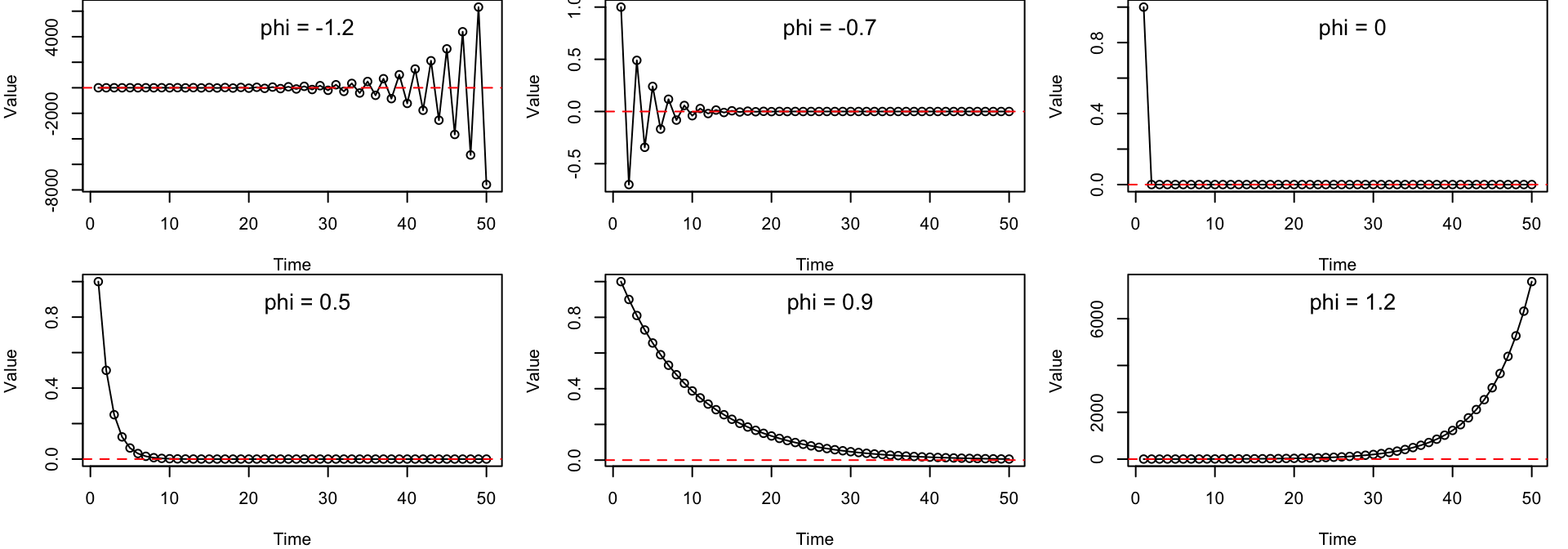
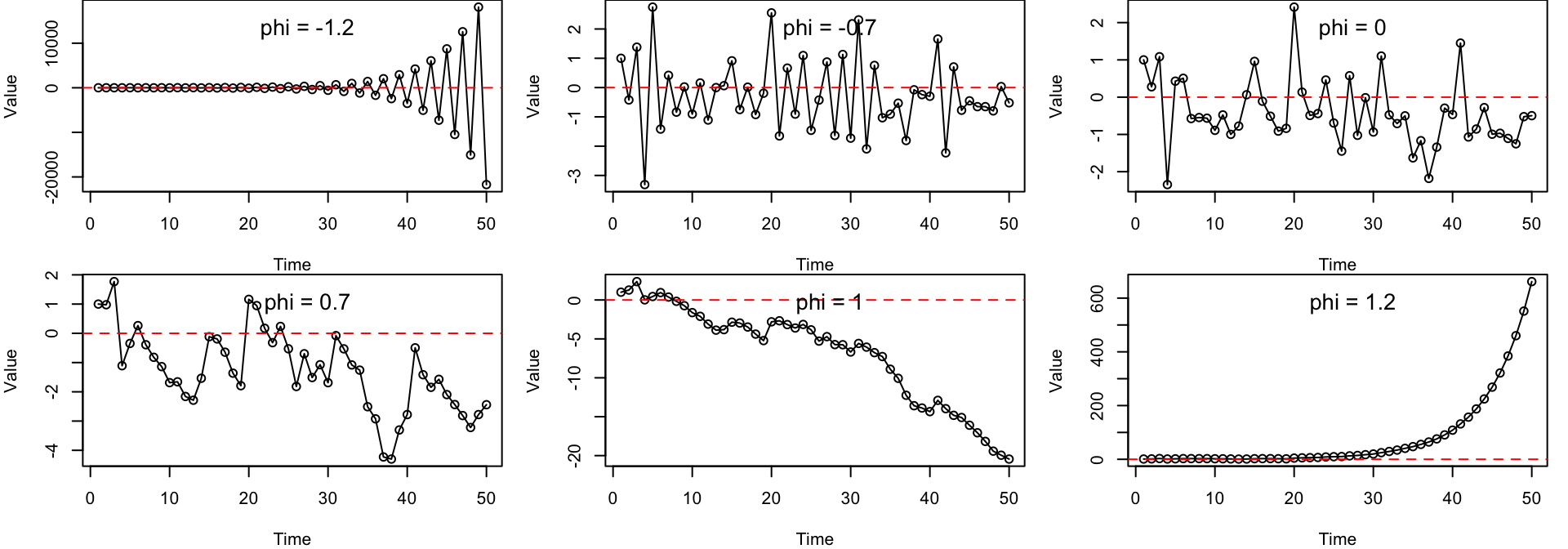
| Value of \(\phi\) | Behaviour |
|---|---|
| \(|\phi| \geq 1\) | Non-stationary, explosive |
| \(\phi < 0\) | Oscillation |
| \(\phi = 0\) | White noise |
| \(0 < \phi < 0.5\) | Low to moderate persistence |
| \(0.5 \leq \phi < 0.9\) | Moderate to high persistence |
| \(0.9 \leq \phi < 1\) | High persistence, close to a unit root |
| Value of \(\phi\) | Behaviour | Interpretation |
|---|---|---|
| \(|\phi| \geq 1\) | Non-stationary, explosive | Shocks grow over time |
| \(\phi < 0\) | Oscillation | Alternating behaviour |
| \(\phi = 0\) | White noise | No memory, shocks do not persist |
| \(0 < \phi < 0.5\) | Low to moderate persistence | Short memory, faster decay of shocks |
| \(0.5 \leq \phi < 0.9\) | Moderate to high persistence | Long memory, slower decay of shocks |
| \(0.9 \leq \phi < 1\) | High persistence, close to a unit root | Very long memory, shocks persist for a long time |
| Value of \(\phi\) | Mean Reversion Behaviour | |
|---|---|---|
| \(|\phi| < 1\) | Mean reversion, deviations decay over time | |
| \(\phi = 1\) | No mean reversion, random walk behaviour | |
| \(|\phi| > 1\) | Explosive behaviour, deviations grow over time |
For AR(1) model, \(\phi\) controls the strength of mean reversion, the persistence of shocks, and the overall stability of the process.
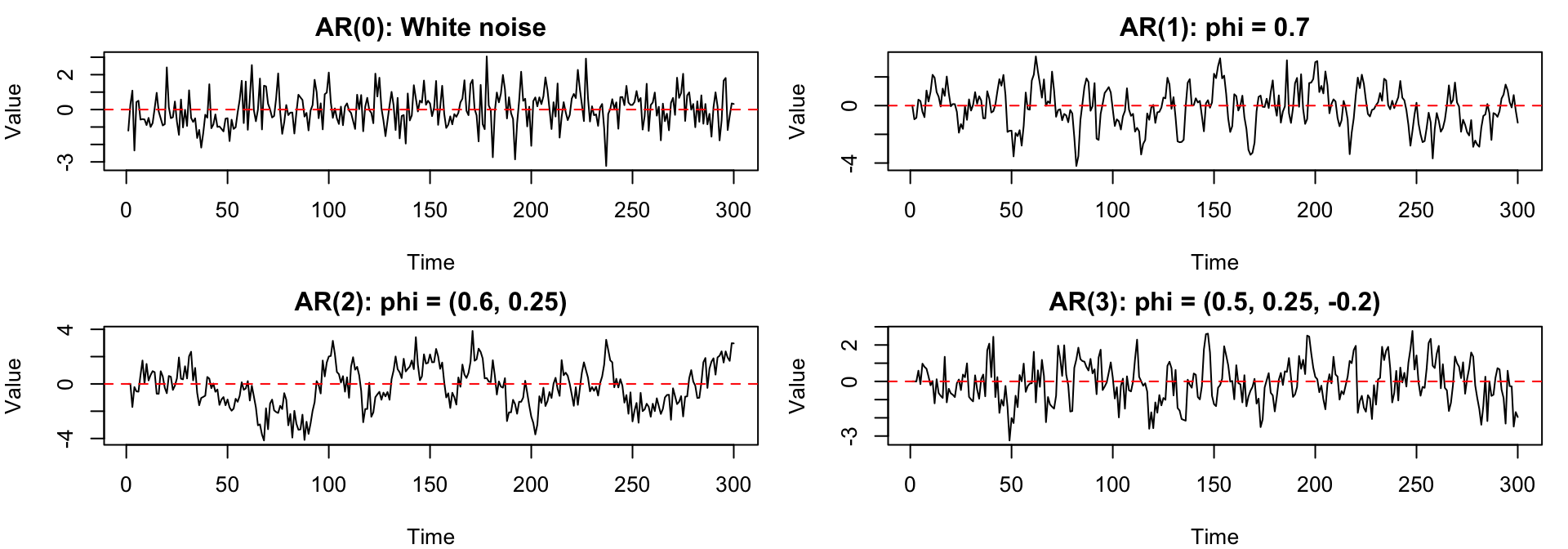
| Model | Example Coefficients | Behaviour |
|---|---|---|
| AR(0) | None | White noise (no memory) |
| AR(1) | \(\phi = 0.7\) | Moderate persistence |
| AR(2) | \(\phi = (0.6, 0.25)\) | Stronger persistence |
| AR(3) | \(\phi = (0.5, 0.25, -0.2)\) | Mixed lag effects |
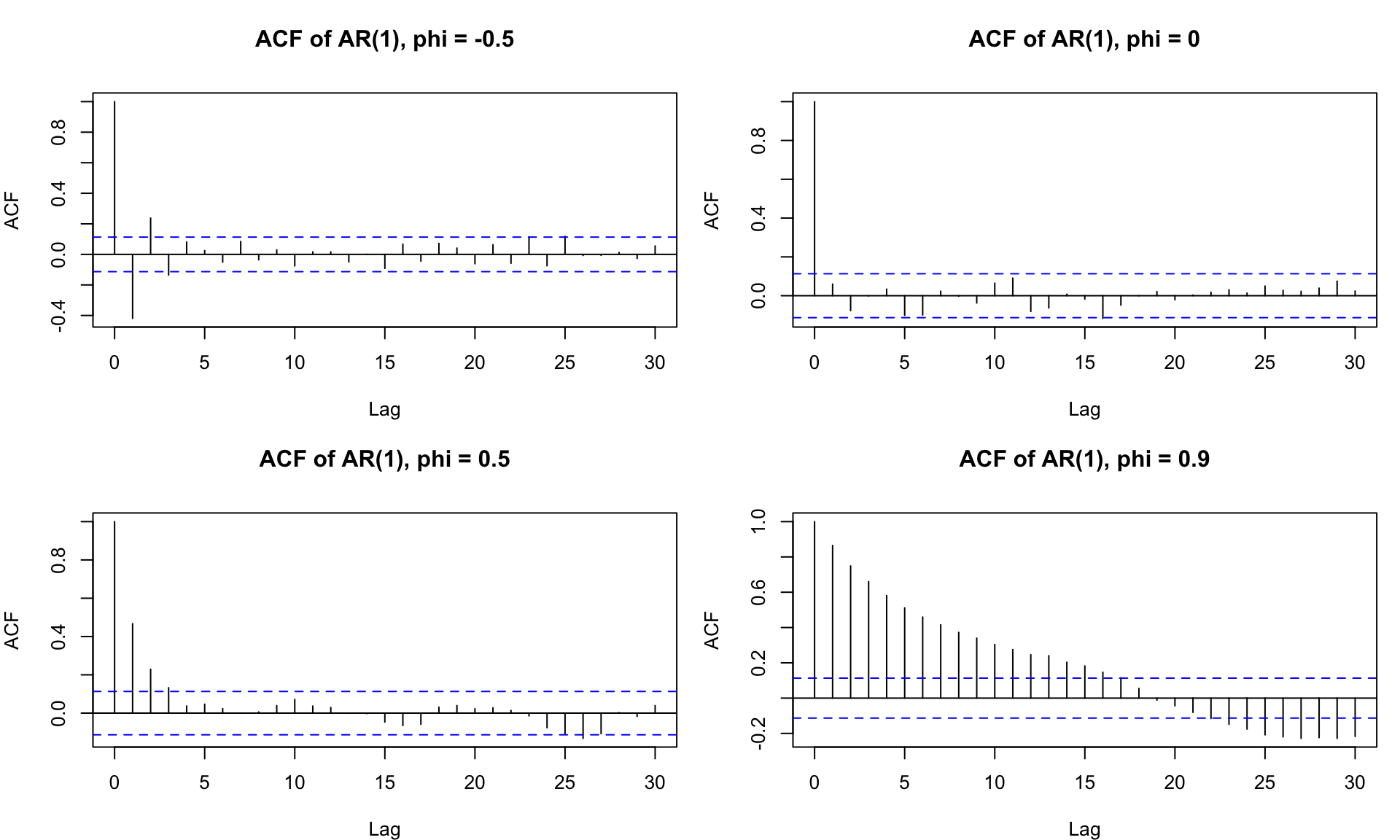
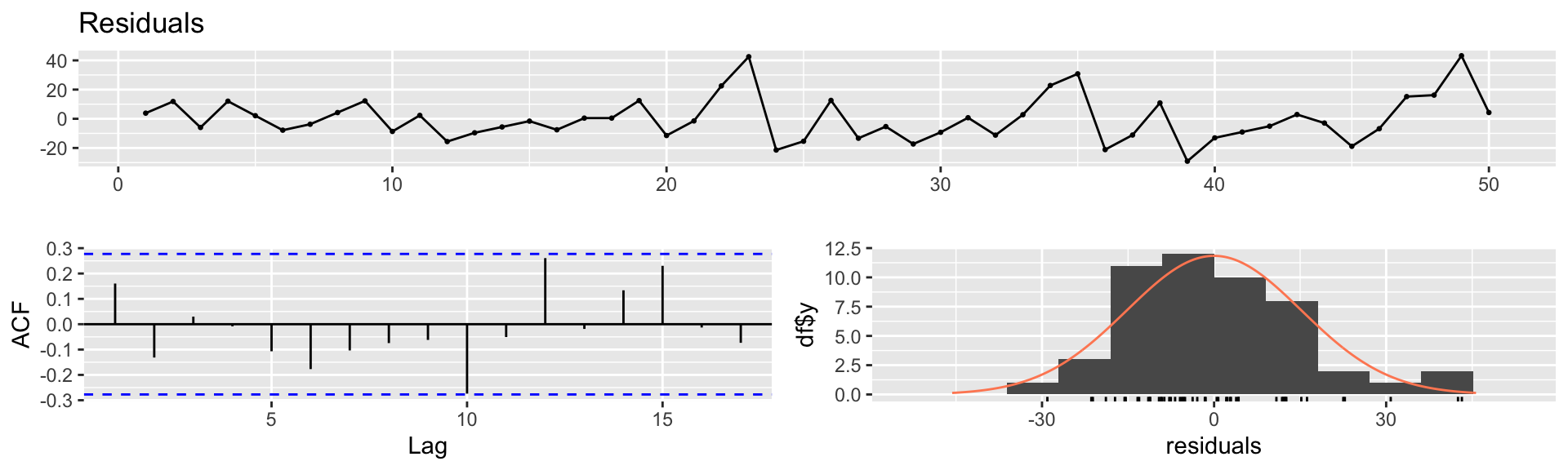
(Aside) Have you seen ACF before?
- In Regression analysis of time series data ACF of residuals is one of a crucial diagnostic plots to check the validity of the OLS assumptions, independence of errors.
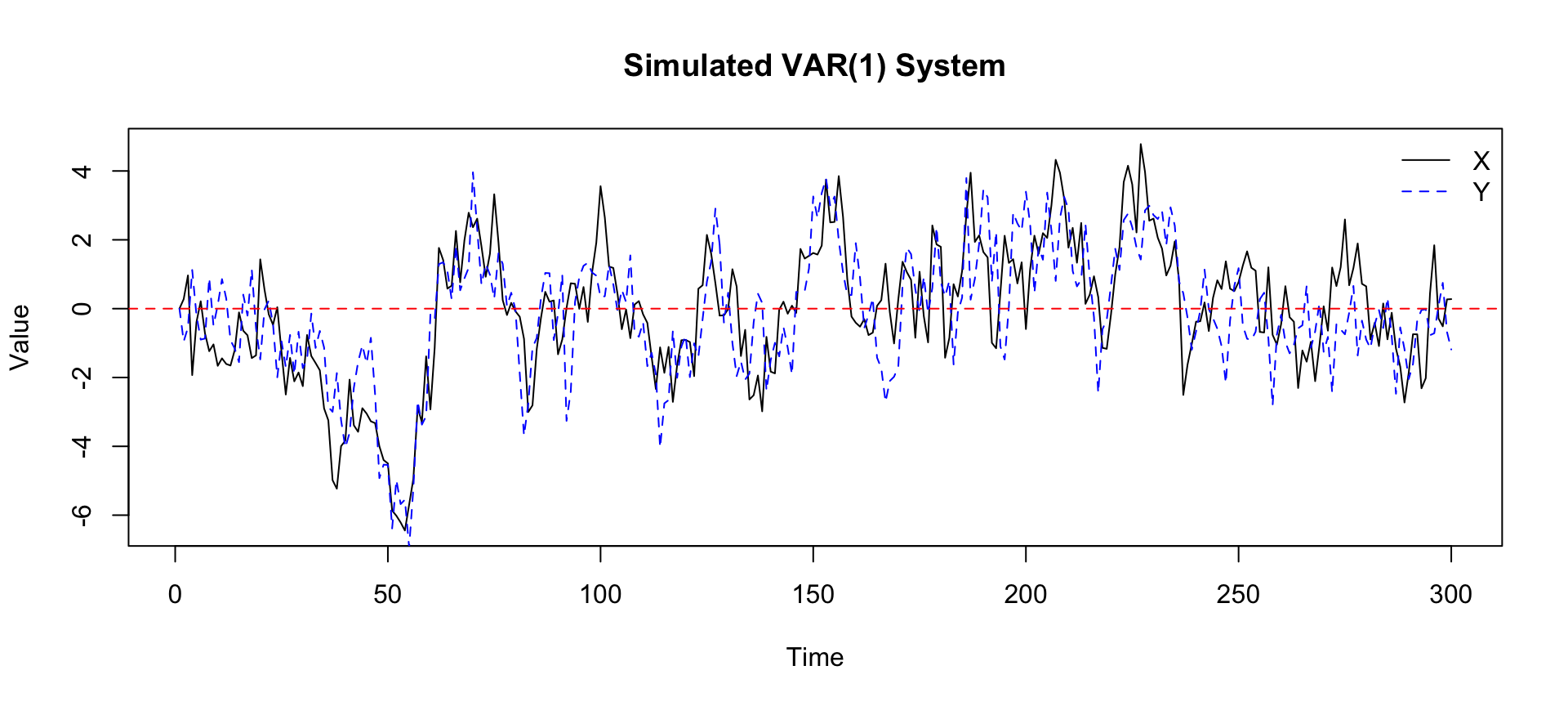
- \(X_t\) depends on past \(X\) and past \(Y\),
- \(Y_t\) depends on past \(Y\) and past \(X\),
- shocks to one variable can influence the other variable later,
- the two series move as an interacting system rather than as isolated processes.
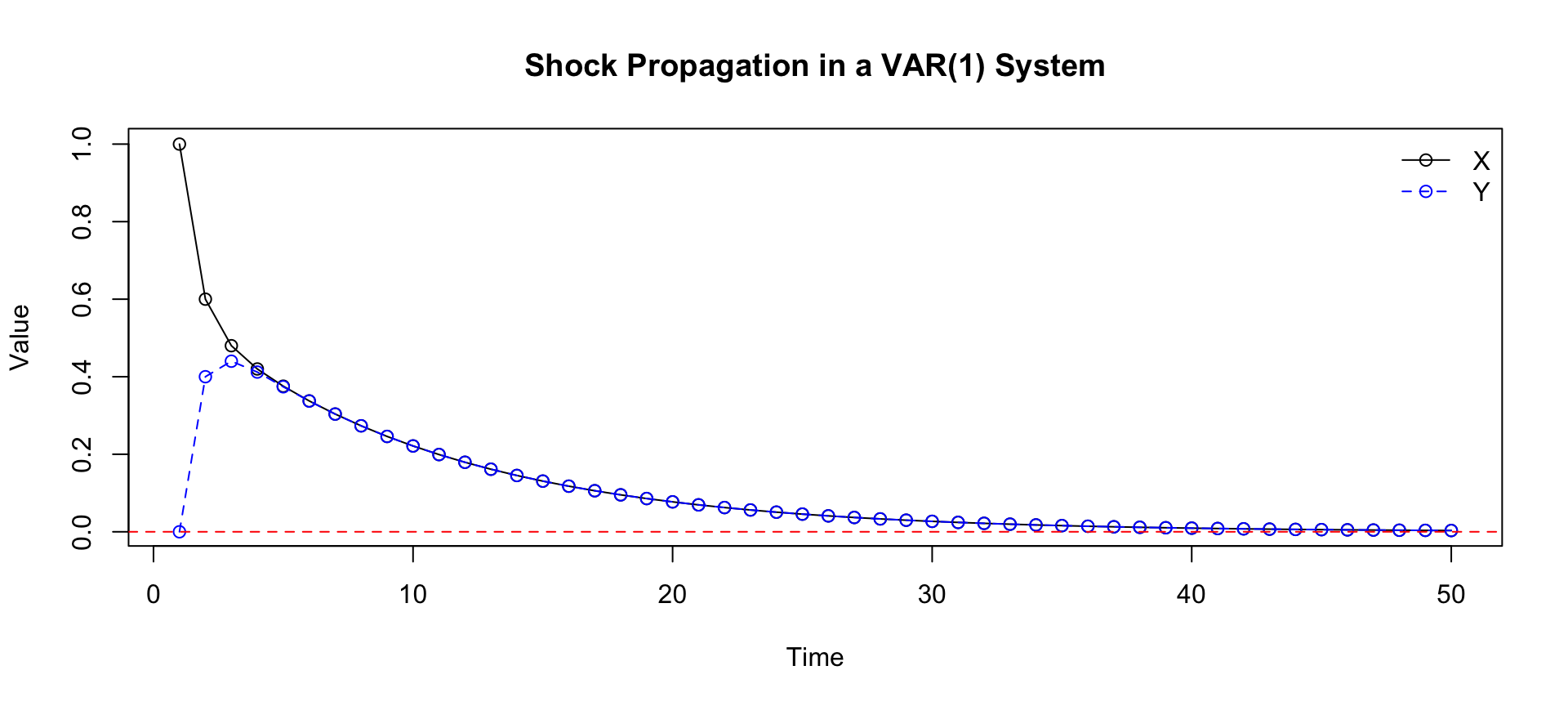
- The initial shock to \(X\) causes \(X\) to jump to 1 at time \(t=1\).
- This shock then propagates to \(Y\) over time due to the interaction between the two variables in the VAR(1) system.
- Both \(X\) and \(Y\) gradually return to their equilibrium values as the effect of the initial shock diminishes.
(Aside) Cross-Correlation Function (CCF)
The cross-correlation function (CCF) measures the correlation between two time series at different lags. For two time series \(X_t\) and \(Y_t\), the lag-\(k\) cross-correlation is defined as:
\[ \gamma_k = \text{Corr}(X_t, Y_{t-k}). \]
Example (continued): Plot the CCF between \(X\) and \(Y\) from the simulated VAR(1) system.
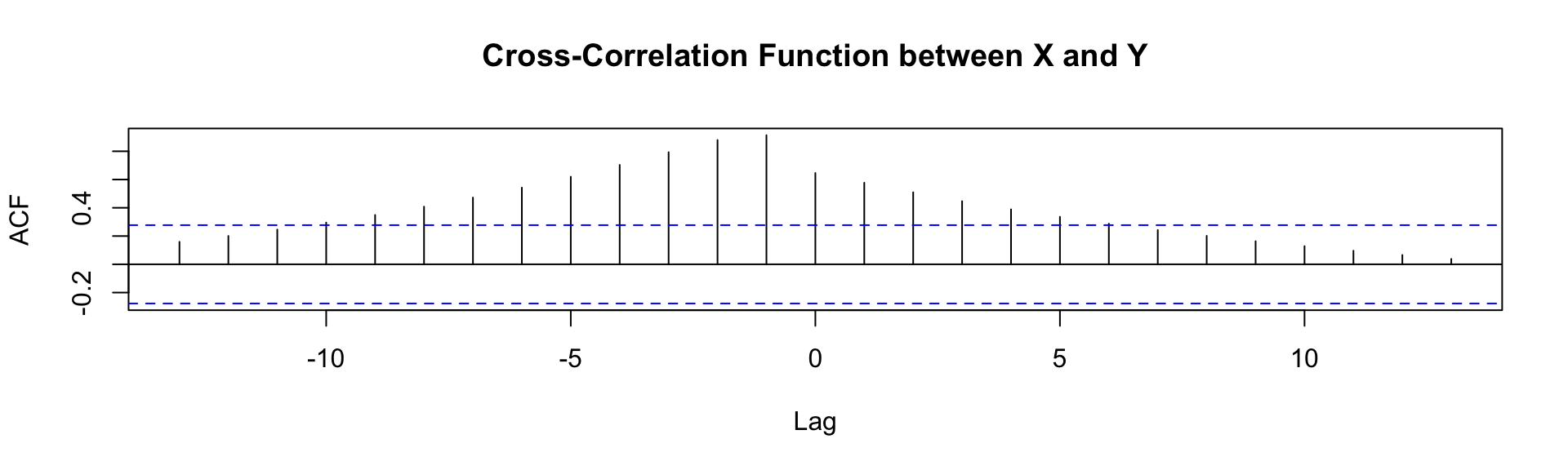
The CCF plot shows significant correlations at certain lags, indicating that \(X\) and \(Y\) are correlated not only concurrently but also across time. This reflects the dynamic interdependence captured by the VAR(1) model.